HAPTIX Project Kickoff
2014-11-07
The Gazebo team at OSRF has been hard at work setting up a simulation environment for the DARPA HAPTIX project. The goal of HAPTIX is to "develop new science and technology to achieve closed-loop control of dexterous mechatronic prostheses that will provide amputees with prosthetic limb systems that feel and function like natural limbs".
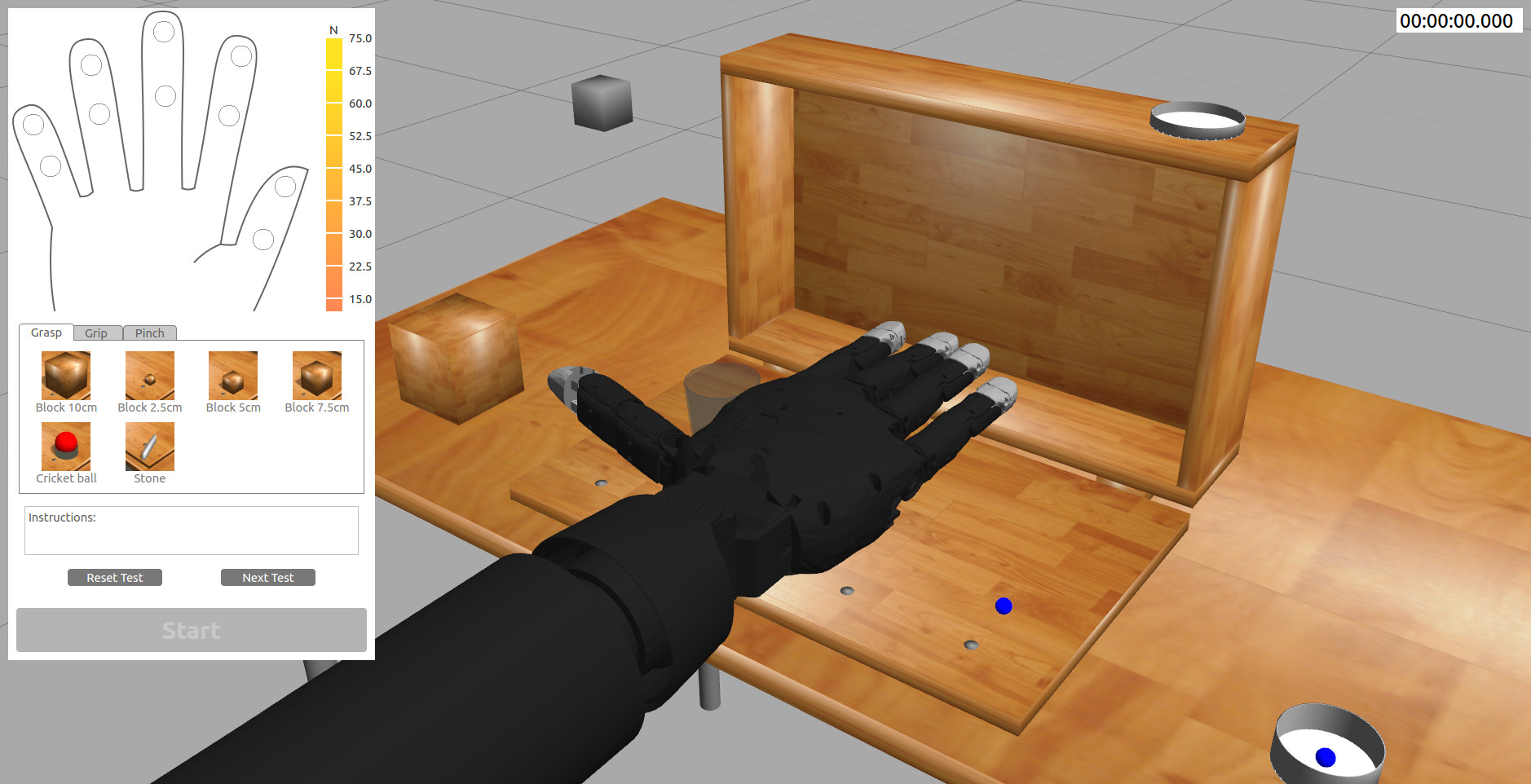
Teams participating on HAPTIX will have access to a customized version of Gazebo that includes models for ARATand the Johns Hopkins APL arm. We have also developed a custom GUI interface, shown below, for testing and development purposes.
This project also marks the first time Windows and Matlab users can interact with Gazebo, thanks to our new cross-platform transport library. The scope is limited to the HAPTIX project, however plans are in motion to bring the entire Gazebo package to Windows.
If you are not a participant in the HAPTIX project, you can still check out the code and run through our tutorials. For more information visit the HAPTIX mini-page at http://gazebosim.org/haptix.


