Gazebo Survey Results
2014-03-16
Thanks to everyone for filling out the Gazebo survey, and helping direct our development plans. We have received 260 responses from simulation users around the world. The following is a summary of the survey results.
Feature Votes
The core content of the survey listed a set of potential features for simulation. Survey participants ranked each feature from one to six, where one is low desire and six high desire. The following graph shows each feature on the x-axis, and the sum of the votes the feature received.
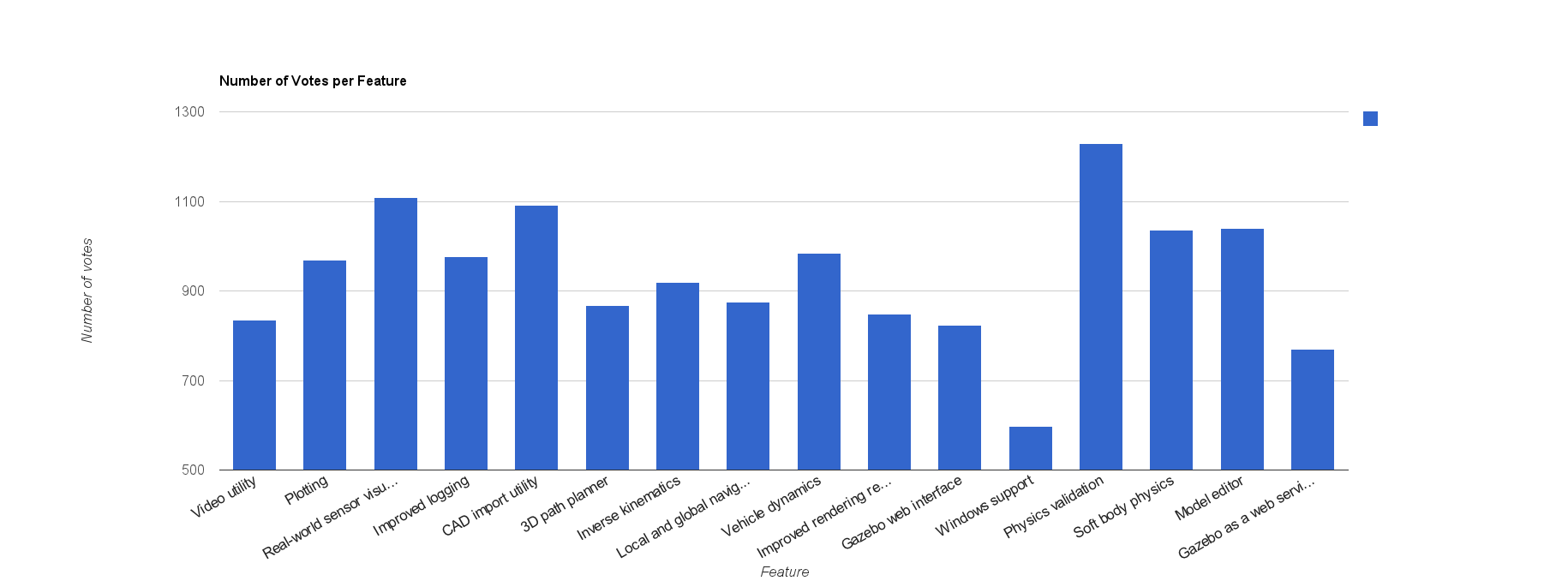
Physics validation has achieved a clear first place position. Throughout its history, Gazebo has aimed to mimic reality as closely as possible in order to offer simulation as a useful development and testing tool. The addition of physics validation will quantitatively ground the accuracy of Gazebo, and help guide the use of simulation. While difficult to accomplish, we also view Physics Validation as a high priority. Stay tuned for more updates on this effort.
Following in second through fourth place are Real-world sensor visualization, CAD import utility, and a graphical model editor. We will lump in the highly rated plotting and improved logging features to form a category about usability. Gazebo has not been known as a tool with a great user experience, and ability to easily import models and retrieve data. Fortunately, this is all about to change. Under active development is a graphical model editor that will simplify the process of creating new robots and objects, a plotting utility, and improved state logging and replay capabilities. Over this summer we will also kick-off a project to facilitate importing CAD models. Most of these features will likely land in Gazebo 4.0, scheduled for a release in fall of 2014.
For those of you keen on features that have not been discussed yet, fear not, they will be developed and integrated into Gazebo. The timeline for these features is a bit more fuzzy, but I can say that most everything on this list will be done or started in less than 1.5 years from now. If you would like to see something accomplished sooner rather than later, please speak up and ideally come prepared to offer some of your time. Send a message to our mailing list, and describe what project you would like to be part of.
Comments and Feedback
We received a lot of great comments, feedback, and perspectives from everyone. The following is a brief list, broken into categories, of the feedback, in black, and our responses to the feedback, in blue.
- General
- More documentation, beginner tutorials, and examples.
We are working on video tutorials, beginner tutorials, and expanding our examples. It's a slow process, primarily because writing code is much more fun and exciting. - Easier installation.
The new website has a handy install script, and we are close to having Gazebo in Ubuntu. - Maintain ROS support
Will do. - Less errors, and more robust.
This is a high priority for us. Gazebo has and ever growing test suite, currently at 200+ tests. We will do our best to make Gazebo as error free as possible. - Scriptable models.
We are looking into Ruby and Python wrappers around a C API for gazebo model and simulation control. - Save plugin state.
Thanks, this is on our radar. We will have to think of a good approach. - Merge SDF/URDF.
This is under active development. As you can imagine, it's not a simple task. - OS X, Windows, Cloud simulation support.
OS X is getting close, Windows has not yet been started, and Cloud simulation will take a major leap forward this spring. - Improve the user experience.
Sounds like an excellent idea!
- More documentation, beginner tutorials, and examples.
- Rendering
- Improve rendering realism.
While not our specialty, we are starting to look into deferred shading other advanced rendering techniques.
- Improve rendering realism.
- Physics & Performance
- CUDA support and more parallelization.
Parallelization has been a topic of conversation among developers, and one that has many caveats. Please contact us if you have insights and ideas. - Fluid dynamics.
Gazebo 3.0 will have an aerodynamics plugin, and water simulation may follow later this year. - Bullet integration.
Will be released in Gazebo 3.0.
- CUDA support and more parallelization.
- Robots and Models
- Estimate model parameters based on data collected from a real-system.
Interesting idea. We'll need some help making this a reality. - Human and crowd models.
We would love to help someone develop this feature. - Tracked robots.
This issue is very relevant.
- Estimate model parameters based on data collected from a real-system.
- Sensors
- Thermal, ultra-sonic, and touch sensors.
Please contact us for help developing more sensors. It usually helps to coordinate with someone who has the physical version of a sensor. - Laser beam widening over distance.
Great idea, and difficult to implement. Would love to hear ideas. - Distribute sensor generation.
This could be very useful. We'll have to look into this topic.
- Thermal, ultra-sonic, and touch sensors.
Thanks again to everyone for their help and support. We look forward to a productive year, and keep the ideas and feedback coming!


