Hand Proprioception & Touch Interfaces
HAPTIX
Overview
General information
HAPTIX is a DARPA program designed to "develop new science and technology to achieve closed-loop control of dexterous mechatronic prostheses that will provide amputees with prosthetic limb systems that feel and function like natural limbs". OSRF, the organization maintaining Gazebo, has been tasked with extending Gazebo to simulate prosthetic hands and test environments, and develop both graphical and programmatic interfaces to the hands.
Announcements
This release includes an update to the HAPTIX API for the DEKA Luke Hand.
Update Instructions
- As usual, on a networked computer, click on the “haptixUpdate” icon on your desktop to update. Download
hx_gz_sdk-Release-0.8.3-win64.zip, from
the OSRF distributions web page
onto the Windows machine that will run Matlab.
- To update an offline computer: download this zip folder onto a USB drive. Transfer the zip folder to the Linux machine and unzip it onto the desktop, then run the “handsim-unbundler” script inside of the folder.
- To check that the installation worked, you can check the version number in Gazebo. Make sure that the handsim version is 0.11.0 or higher.
- Tutorial for installation and simulating DEKA Luke hand model in Gazebo Handsim can be found at http://gazebosim.org/tutorials?tut=haptix_luke_hand&cat=haptix&branch=hapix_luke_hand.
Release notes
- Features
- The handsim controller plugin has been updated to mimic the hardware. On the current hardware (Luke Hand v3), the driver assigns motor_vel, motor_torque and joint_vel zero values even if the physical velocity and torque values on the actual hand is not zero.
Updated HAPTIX API documentation and Luke hand model configurations.
This release includes an update to the HAPTIX API for the DEKA Luke Hand.
Update Instructions
- As usual, on a networked computer, click on the “haptixUpdate” icon on your desktop to update. Download
hx_gz_sdk-Release-0.8.3-win64.zip, from
the OSRF distributions web page
onto the Windows machine that will run Matlab.
- To update an offline computer: download this zip folder onto a USB drive. Transfer the zip folder to the Linux machine and unzip it onto the desktop, then run the “handsim-unbundler” script inside of the folder.
- To check that the installation worked, you can check the version number in Gazebo. Make sure that the handsim version is 0.11.0 or higher.
- Tutorial for installation and simulating DEKA Luke hand model in Gazebo Handsim can be found at http://gazebosim.org/tutorials?tut=haptix_luke_hand&cat=haptix&branch=hapix_luke_hand.
Release notes
- Features
- The API has been updated, ref_vel has been added along side of ref_vel_max.
Updated HAPTIX API documentation and Luke hand model configurations.
We’re happy to announce a new release of the Gazebo HAPTIX simulation software. This release includes changes necessary to support the DEKA Luke hand model.
Update Instructions
- As usual, on a networked computer, click on the “haptixUpdate” icon on your desktop to update. Download
hx_gz_sdk-Release-0.8.2-win64.zip, from
the OSRF distributions web page
onto the Windows machine that will run Matlab.
- To update an offline computer: download this zip folder onto a USB drive. Transfer the zip folder to the Linux machine and unzip it onto the desktop, then run the “handsim-unbundler” script inside of the folder.
- To check that the installation worked, you can check the version number in Gazebo. Make sure that the handsim version is 0.10.0 or higher.
Release notes
- Features
- Simulation logging has been enabled and made much more efficient than before. To checkout this new feature, please see the logging tutorial.
- Grasp trajectory support: Grasp now supports multiple waypoint trajectory. Grasp command can vary from 0 to 1, with corresponding motor position waypoints.
- Added `luke_hand.world` for starting DEKA Luke hand model.
- Bug fixes
- Contact sensor data correction and contact sensor visualization
Updated HAPTIX API documentation and Luke hand model configurations..
We’re happy to announce a new release of the Gazebo HAPTIX simulation software. This release fixes a number of bugs and adds a number of features, largely in response to your feedback. Please keep the feedback coming, via the bug tracker. Further improvements are in the works already, to be included in subsequent releases.
The haptix tutorials have been updated to match the new release.
Update instructions and release notes are below. We recommend that you update your installation as soon as you can, and let us know if you have any problems, or if you require assistance in performing the update.
Update Instructions
- On a networked computer, click on the “haptixUpdate” icon on your desktop to update. Download hx_gz_sdk-Release-0.7.2-win64.zip, from the OSRF distributions web page onto the Windows machine that will run Matlab.
- To update an offline computer: download this zip folder onto a USB drive. Transfer the zip folder to the Linux machine and unzip it onto the desktop, then run the “handsim-unbundler” script inside of the folder.
- To check that the installation worked, you can check the version number in Gazebo. Make sure that the handsim version is 0.8.2.
Release notes
- Features
- World Simulation API. You can now interface with simulation in C or in Matlab/Octave to add, remove, and manipulate objects, change the camera angle, and move the robotic arm.
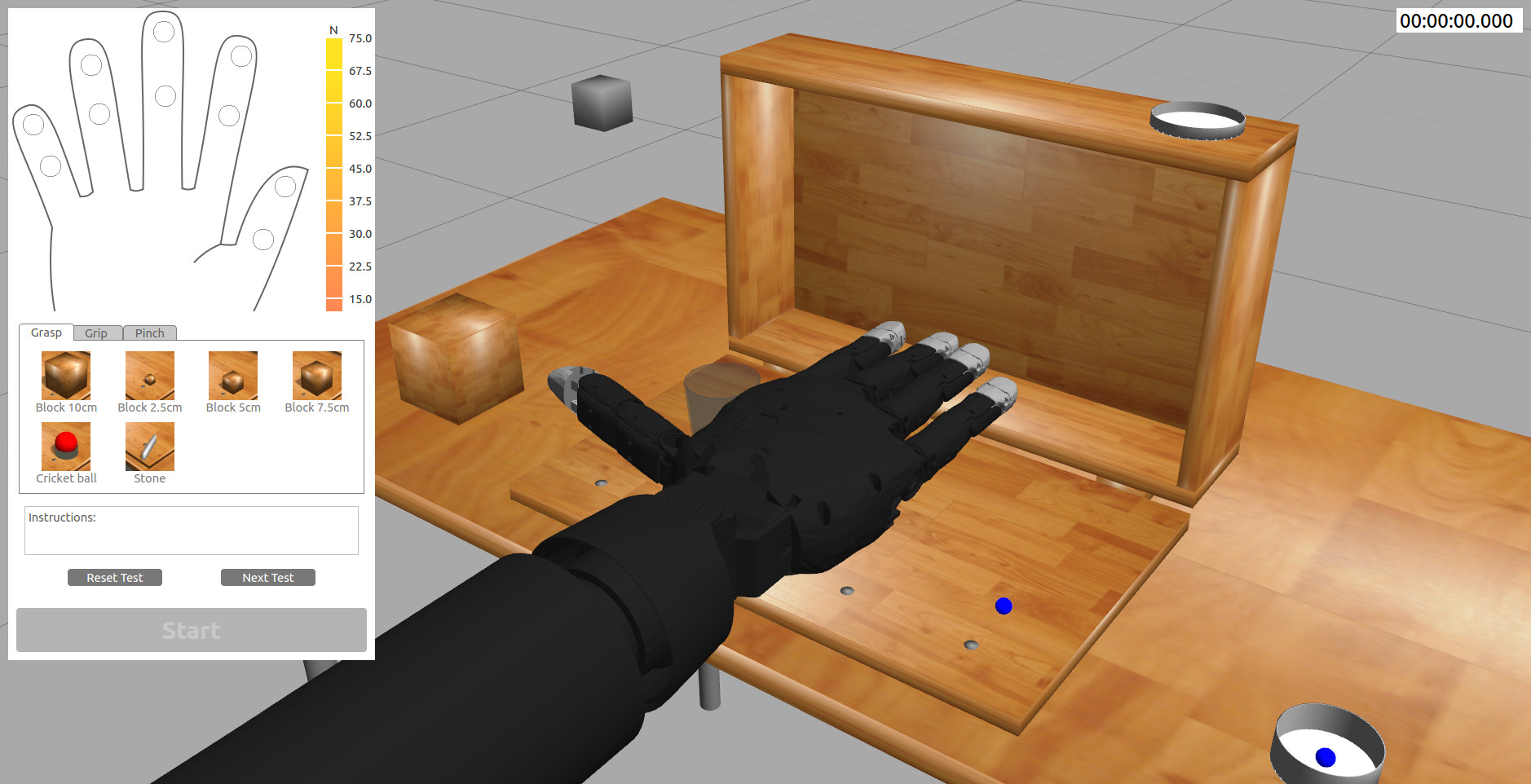
- New enhanced GUI, separating tasks menu from hand sensor/control visuals.
- Bug fixes
Update HAPTIX API documentation includes the new world simulation API.
HAPTIX API documentation has been posted. This documentation contain information about the C programming interface for the HAPTIX project.
OSRF will host a tutorial session at the HAPTIX kickoff on November 13, 2014 from 2:30PM to 5:30PM. This tutorial session will cover installation of Gazebo and supporting packages, keyboard tele-operation of the APL arm, and programmatic control of the APL arm through Windows and Matlab.
Requirements for tutorial participants:
- Windows laptop
- Visual Studio 2013
- Matlab R2014b (optional)
Tutorial agenda (1 hour):
- Software installation
- Using the C-API
- Using the Matlab API
OSRF staff will be on hand to answer questions and provide support.
Gazebo's HAPTIX website goes live.
Videos
This release includes an update to the HAPTIX API for the DEKA Luke Hand.
Update Instructions
- As usual, on a networked computer, click on the “haptixUpdate” icon on your desktop to update. Download hx_gz_sdk-Release-0.8.3-win64.zip, from the OSRF distributions web page onto the Windows machine that will run Matlab.
- To update an offline computer: download this zip folder onto a USB drive. Transfer the zip folder to the Linux machine and unzip it onto the desktop, then run the “handsim-unbundler” script inside of the folder.
- To check that the installation worked, you can check the version number in Gazebo. Make sure that the handsim version is 0.11.0 or higher.
- Tutorial for installation and simulating DEKA Luke hand model in Gazebo Handsim can be found at http://gazebosim.org/tutorials?tut=haptix_luke_hand&cat=haptix&branch=hapix_luke_hand.
Release notes
- Features
- The handsim controller plugin has been updated to mimic the hardware. On the current hardware (Luke Hand v3), the driver assigns motor_vel, motor_torque and joint_vel zero values even if the physical velocity and torque values on the actual hand is not zero.
Updated HAPTIX API documentation and Luke hand model configurations.
This release includes an update to the HAPTIX API for the DEKA Luke Hand.
Update Instructions
- As usual, on a networked computer, click on the “haptixUpdate” icon on your desktop to update. Download hx_gz_sdk-Release-0.8.3-win64.zip, from the OSRF distributions web page onto the Windows machine that will run Matlab.
- To update an offline computer: download this zip folder onto a USB drive. Transfer the zip folder to the Linux machine and unzip it onto the desktop, then run the “handsim-unbundler” script inside of the folder.
- To check that the installation worked, you can check the version number in Gazebo. Make sure that the handsim version is 0.11.0 or higher.
- Tutorial for installation and simulating DEKA Luke hand model in Gazebo Handsim can be found at http://gazebosim.org/tutorials?tut=haptix_luke_hand&cat=haptix&branch=hapix_luke_hand.
Release notes
- Features
- The API has been updated, ref_vel has been added along side of ref_vel_max.
Updated HAPTIX API documentation and Luke hand model configurations.
We’re happy to announce a new release of the Gazebo HAPTIX simulation software. This release includes changes necessary to support the DEKA Luke hand model.
Update Instructions
- As usual, on a networked computer, click on the “haptixUpdate” icon on your desktop to update. Download hx_gz_sdk-Release-0.8.2-win64.zip, from the OSRF distributions web page onto the Windows machine that will run Matlab.
- To update an offline computer: download this zip folder onto a USB drive. Transfer the zip folder to the Linux machine and unzip it onto the desktop, then run the “handsim-unbundler” script inside of the folder.
- To check that the installation worked, you can check the version number in Gazebo. Make sure that the handsim version is 0.10.0 or higher.
Release notes
- Features
- Simulation logging has been enabled and made much more efficient than before. To checkout this new feature, please see the logging tutorial.
- Grasp trajectory support: Grasp now supports multiple waypoint trajectory. Grasp command can vary from 0 to 1, with corresponding motor position waypoints.
- Added `luke_hand.world` for starting DEKA Luke hand model.
- Bug fixes
- Contact sensor data correction and contact sensor visualization
Updated HAPTIX API documentation and Luke hand model configurations..
We’re happy to announce a new release of the Gazebo HAPTIX simulation software. This release fixes a number of bugs and adds a number of features, largely in response to your feedback. Please keep the feedback coming, via the bug tracker. Further improvements are in the works already, to be included in subsequent releases.
The haptix tutorials have been updated to match the new release.
Update instructions and release notes are below. We recommend that you update your installation as soon as you can, and let us know if you have any problems, or if you require assistance in performing the update.
Update Instructions
- On a networked computer, click on the “haptixUpdate” icon on your desktop to update. Download hx_gz_sdk-Release-0.7.2-win64.zip, from the OSRF distributions web page onto the Windows machine that will run Matlab.
- To update an offline computer: download this zip folder onto a USB drive. Transfer the zip folder to the Linux machine and unzip it onto the desktop, then run the “handsim-unbundler” script inside of the folder.
- To check that the installation worked, you can check the version number in Gazebo. Make sure that the handsim version is 0.8.2.
Release notes
- Features
- World Simulation API. You can now interface with simulation in C or in Matlab/Octave to add, remove, and manipulate objects, change the camera angle, and move the robotic arm.
- New enhanced GUI, separating tasks menu from hand sensor/control visuals.
- Bug fixes
Update HAPTIX API documentation includes the new world simulation API.
HAPTIX API documentation has been posted. This documentation contain information about the C programming interface for the HAPTIX project.
OSRF will host a tutorial session at the HAPTIX kickoff on November 13, 2014 from 2:30PM to 5:30PM. This tutorial session will cover installation of Gazebo and supporting packages, keyboard tele-operation of the APL arm, and programmatic control of the APL arm through Windows and Matlab.
Requirements for tutorial participants:
- Windows laptop
- Visual Studio 2013
- Matlab R2014b (optional)
Tutorial agenda (1 hour):
- Software installation
- Using the C-API
- Using the Matlab API
Gazebo's HAPTIX website goes live.
For Teams
Information for HAPTIX participants
This section is focused on supporting participants in the HAPTIX program. Below you will find information about equipment, and links to secure software.
Arm Schematics
The following diagrams describe the locations of sensors, motors, and joints on the MPL hand. The numbers on the diagrams correspond to indices in data arrays specified in the C API.




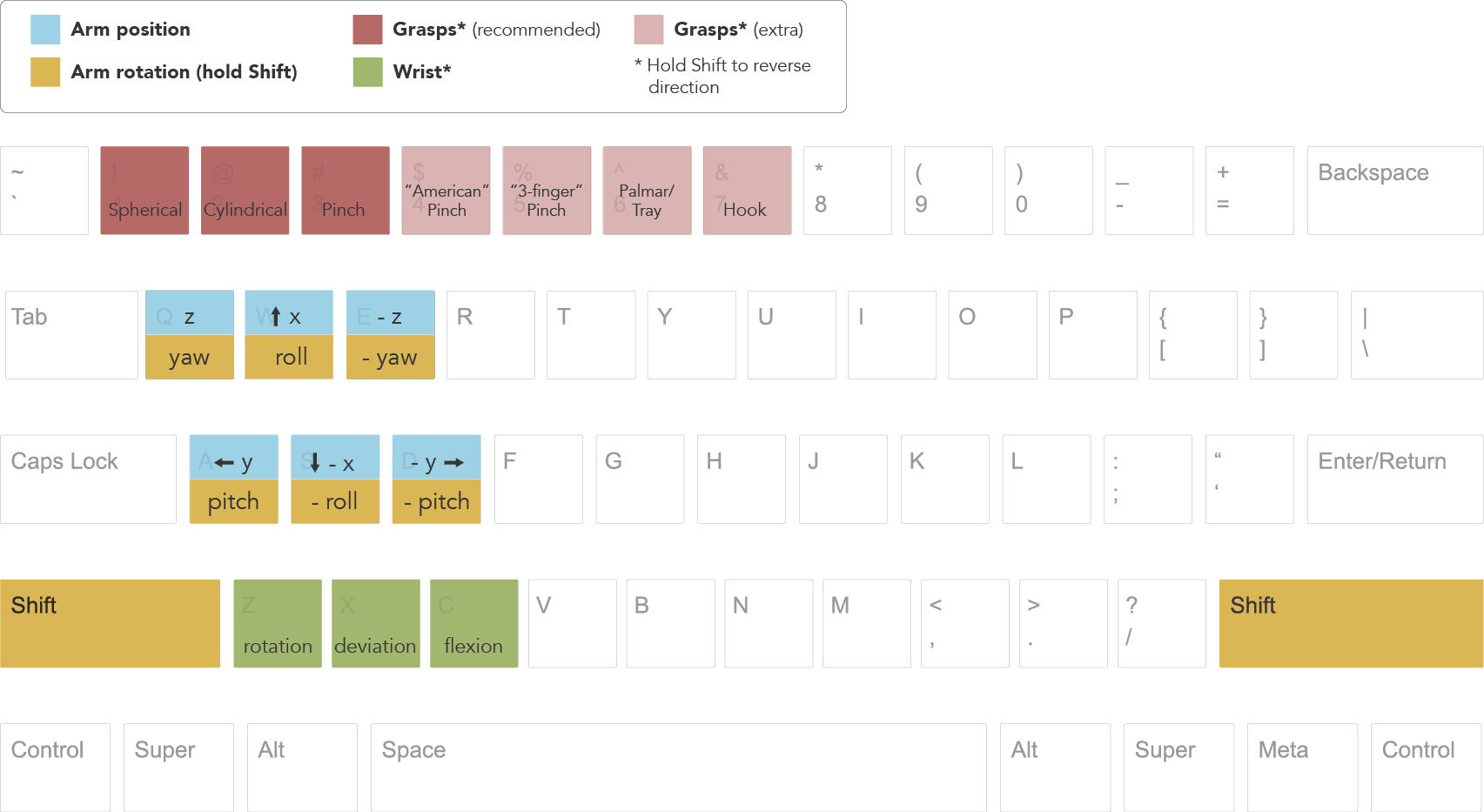
Keyboard Teleoperation
Integrated within the HAPTIX simulation environment is the capability to control the arm via a keyboard. Using the keyboard mapping shown below, you can move and rotate the arm, and open and close the hand.
Equipment
Teams will receive a hardware simulation setup from OSRF for development and testing purposes. This simulation setup will include a computer to run Gazebo, a Optitrack motion capture device, Nvidia stereo glasses and 3D monitor, spacenav joystick. Note that this configuration is preliminary, and subject to change.

Tutorials
Installation and usage guides
The tutorials available from the following links provide detailed instructions for installation and usage of Gazebo's HAPTIX simulation environment.
API
C and Matlab documentation
The Matlab interface is generated from the C-API. The HAPTIX functions between C and Matlab are identical, with the constraint that Matlab uses a slightly different syntax than C. Please refer to the Matlab tutorial for examples.
Help
Sources of support
We strive to provide responsive and high-quality support for our software. Please refer to the following list of our support resources to find the right avenue for help and information.
- HAPTIX API: Documentation for the HAPTIX C interface.
- Questions and answers: A community-supported forum for posting questions and answers.
- Issue tracker: A resource to submit and follow feature requests, bugs, and enhancements.
- Community: A place for general discussion and questions about Gazebo and simulation.
Roadmap
Expected development timeline
2015-04-30
- Release API for creating and manipulating simulated worlds.
2015-07-31
- Implement soft contact torsional friction constraint.
2015-11-15
- Update limb simulation model to match the selected physical limb.
2015-11-30
- Update manipulation tasks and environments.
- Provide example task scoring module that uses the world simulation API.
- Provide support for data logging, playback, and analysis.


