Projects
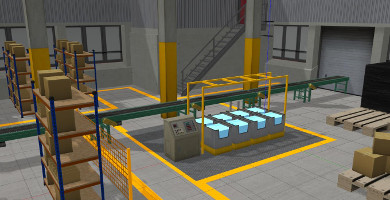
Agile Robotics for Industrial Automation Competition (ARIAC)
This is a simulation-based competition designed to promote robot agility by utilizing the latest advances in artificial intelligence and robot planning.
SDFormat
SDF is an XML format that describes objects and environments for robot simulators, visualization, and control. Originally developed as part of the Gazebo robot simulator, SDF was designed with scientific robot applications in mind. Over the years, SDF has become a stable, robust, and extensible format capable of describing all aspects of robots, static and dynamic objects, lighting, terrain, and even physics.

Ignition
Ignition is a set of simple libraries that provide useful functionality to bootstrap robot applications. The included libraries encapsulate all the essentials, such as common math data types, console logging, 3D mesh management, and asynchronous message passing. Grab the code, start developing, and easily access other applications like the Gazebo robot simulator.
GzWeb
Gzweb is a WebGL client for Gazebo. Like gzclient, it's a front-end graphical interface to gzserver and provides visualization of the simulation. However, Gzweb is a thin client in comparison, and lets you interact with the simulation from the comfort of a web browser. This means cross-platform support, minimal client-side installation, and support for mobile devices.

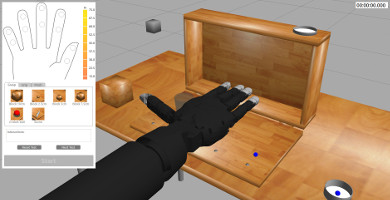
HAPTIX
HAPTIX is a DARPA program designed to "develop new science and technology to achieve closed-loop control of dexterous mechatronic prostheses that will provide amputees with prosthetic limb systems that feel and function like natural limbs". OSRF, the organization maintaining Gazebo, has been tasked with extending Gazebo to simulate prosthetic hands and test environments, and develop both graphical and programmatic interfaces to the hands.