The second part in our series of posts about new features in Gazebo 3.0 covers Digital Elevation Models and terrain paging.
A Digital Elevation Model (DEM) is a 3D representation of a terrain's surface that does not include any objects like buildings or vegetation.
The main motivation to support DEMs in Gazebo is to be able to simulate realistic terrain. For example, rescue or agriculture applications might be interested in testing their robot behaviors using a simulated terrain that matches the real world.
Organizations such as Global Land Cover Facility maintains a high-resolution digital topographic database of Earth. It's possible to search and download a specific region in any available DEM database and load it into Gazebo.
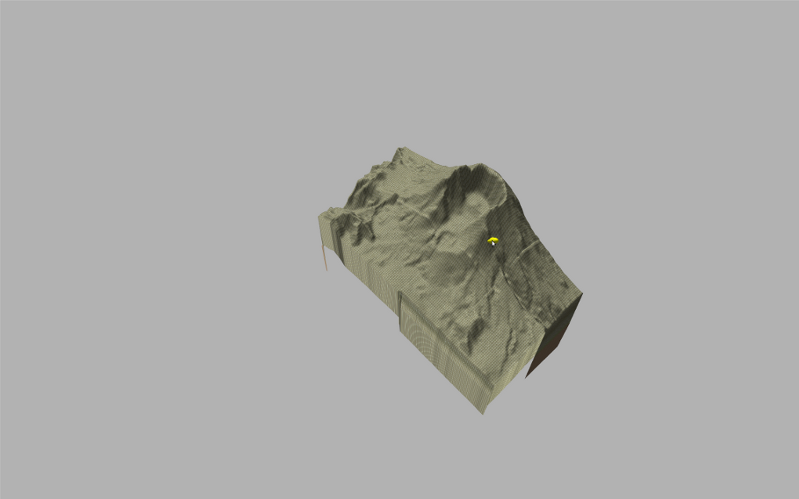
Gazebo 3.0 is able to load a DEM terrain in any of the near 100 different formats supported by GDAL, the underlying library that we are using to manage the terrains. Currently, Gazebo supports the option of loading the DEM keeping its original dimensions, or re-scaling it using a specific width, height, and elevation.
As an example, you can see screenshots of the Canary Islands in Spain and the Mount St. Helens in United States.
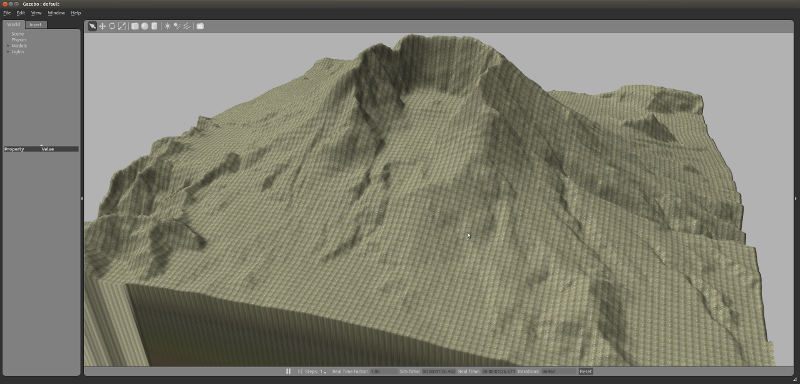
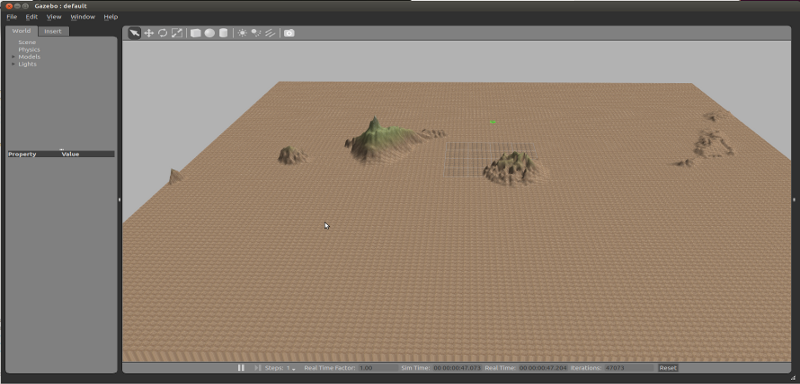
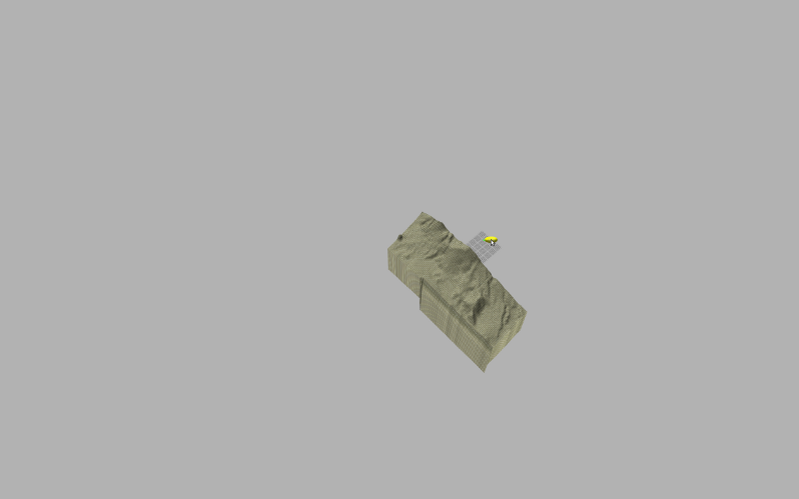
A new terrain paging strategy has been implemented in Gazebo. This feature has been partially adapted from the Ogre graphics engine. The terrain is internally split in multiple pieces. Each piece is loaded/unloaded by the rendering engine depending on its distance to the cameras in the scene.
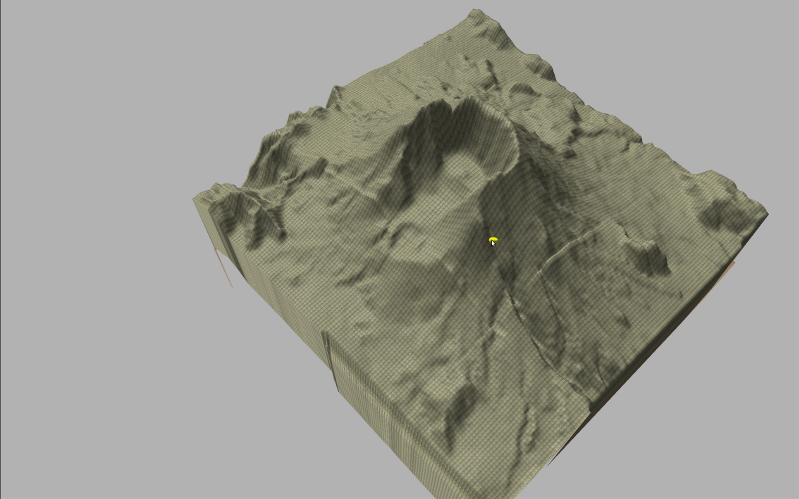
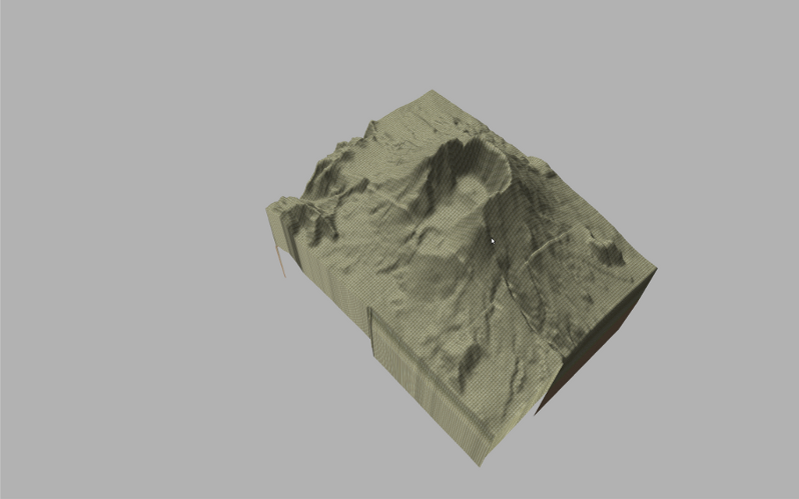
The terrain paging for the rendering engine is an optional feature. A new
The screenshot shows four snapshots of the same scene with the camera user at different distances from the terrain. As you can see, the subterrains are unloaded from the scene while the camera moves away. The distances from the camera at which terrain pages are loaded/unloaded can be parametrized.
New Feature Hightlight: Lightmaps
2014-04-09
This is the first part in a series of posts about new features in the soon to be released Gazebo 3.0.
Gazebo will gain the capability of using lightmaps, which can be used to improve the rendering performance of complex scenes. Lightmaps can be thought of as texture maps with lighting information pre-baked into the texture. The resulting models appear as if they are shaded by lights in the environment but in fact they are just textures. Lightmaps are typically used for models that do not move with respect to the pose of the lights in the scene. For example, static buildings in an environment with a directional light.
In Gazebo, a lightmap is associated to a model as opposed to the whole scene because there is almost always the chance that something moves in a robot simulation! Lightmaps can be created using popular 3D modeling tools, such as Blender, with the lighting model you see fit. Once the lightmap is generated, export it along with the mesh files and textures as usual and place them in your Gazebo model path. In the model SDF file, apply the lightmap to the model in the same way as if it’s a texture map then simply disable the lighting on the visual.
An example model with lightmap is added to the Gazebo model database. Look for the table_marble model in the Insert Model tab in Gazebo.
Project Status
2014-04-02
The Gazebo development team has been hard at work creating, refining, and testing the next version of Gazebo. We realized that a significant amount of knowledge surrounding the development and release process is held solely by the core developers. With a update to the Gazebo website, this information is now available to everyone.
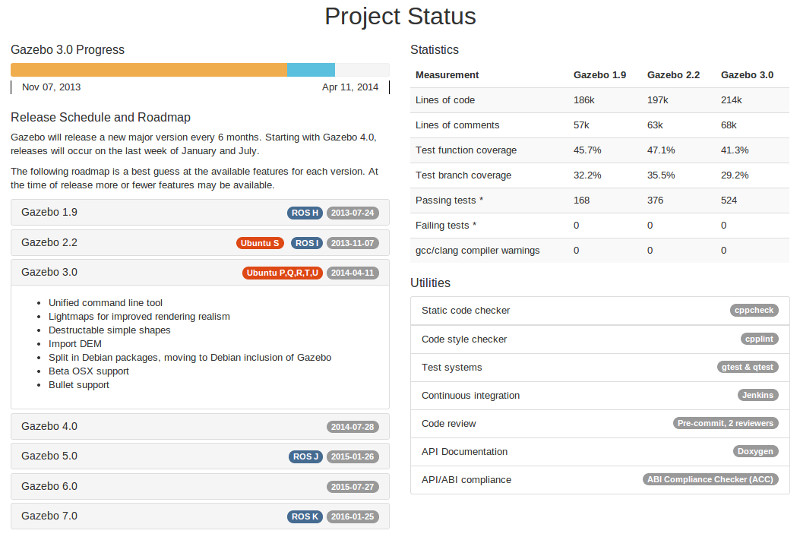
The new Project Status section displays a plethora of useful information for people keen on understanding what has happened and what will be released in the near future. A progress bar on top of left column indicates the current release phase (development = orange, feature freeze = blue, code freeze = green). Below the progress bar is the Gazebo road map that includes key features from previous releases. The badges on the road map boxes indicate what version of Gazebo will be in ROS, and the recommended version for use with Ubuntu.
The right column contains a table with statistics about the code itself. This information can be used to evaluate the quality of the code. Below the table is a list of the tools that we use to check, test, and evaluate the code that is written.
Hope you enjoy and find the information useful!
Gazebo Survey Results
2014-03-16
Thanks to everyone for filling out the Gazebo survey, and helping direct our development plans. We have received 260 responses from simulation users around the world. The following is a summary of the survey results.
Feature Votes
The core content of the survey listed a set of potential features for simulation. Survey participants ranked each feature from one to six, where one is low desire and six high desire. The following graph shows each feature on the x-axis, and the sum of the votes the feature received.
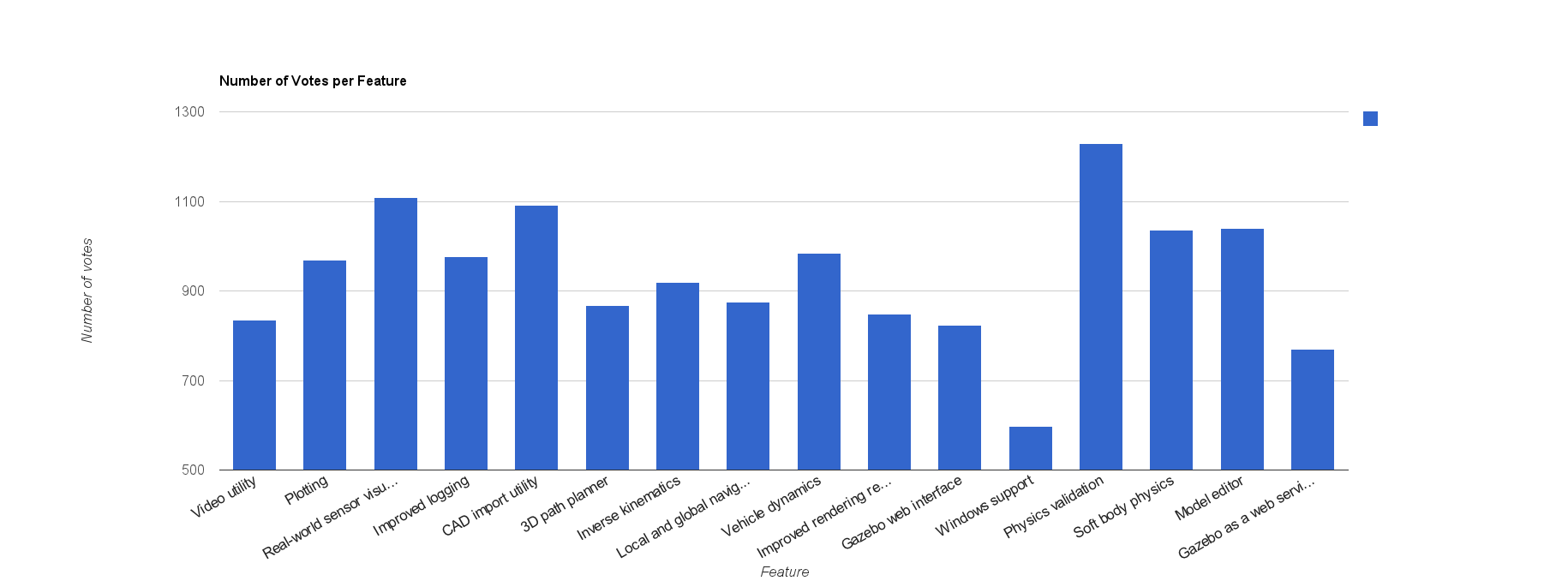
Physics validation has achieved a clear first place position. Throughout its history, Gazebo has aimed to mimic reality as closely as possible in order to offer simulation as a useful development and testing tool. The addition of physics validation will quantitatively ground the accuracy of Gazebo, and help guide the use of simulation. While difficult to accomplish, we also view Physics Validation as a high priority. Stay tuned for more updates on this effort.
Following in second through fourth place are Real-world sensor visualization, CAD import utility, and a graphical model editor. We will lump in the highly rated plotting and improved logging features to form a category about usability. Gazebo has not been known as a tool with a great user experience, and ability to easily import models and retrieve data. Fortunately, this is all about to change. Under active development is a graphical model editor that will simplify the process of creating new robots and objects, a plotting utility, and improved state logging and replay capabilities. Over this summer we will also kick-off a project to facilitate importing CAD models. Most of these features will likely land in Gazebo 4.0, scheduled for a release in fall of 2014.
For those of you keen on features that have not been discussed yet, fear not, they will be developed and integrated into Gazebo. The timeline for these features is a bit more fuzzy, but I can say that most everything on this list will be done or started in less than 1.5 years from now. If you would like to see something accomplished sooner rather than later, please speak up and ideally come prepared to offer some of your time. Send a message to our mailing list, and describe what project you would like to be part of.
Comments and Feedback
We received a lot of great comments, feedback, and perspectives from everyone. The following is a brief list, broken into categories, of the feedback, in black, and our responses to the feedback, in blue.
- General
- More documentation, beginner tutorials, and examples.
We are working on video tutorials, beginner tutorials, and expanding our examples. It's a slow process, primarily because writing code is much more fun and exciting. - Easier installation.
The new website has a handy install script, and we are close to having Gazebo in Ubuntu. - Maintain ROS support
Will do. - Less errors, and more robust.
This is a high priority for us. Gazebo has and ever growing test suite, currently at 200+ tests. We will do our best to make Gazebo as error free as possible. - Scriptable models.
We are looking into Ruby and Python wrappers around a C API for gazebo model and simulation control. - Save plugin state.
Thanks, this is on our radar. We will have to think of a good approach. - Merge SDF/URDF.
This is under active development. As you can imagine, it's not a simple task. - OS X, Windows, Cloud simulation support.
OS X is getting close, Windows has not yet been started, and Cloud simulation will take a major leap forward this spring. - Improve the user experience.
Sounds like an excellent idea!
- More documentation, beginner tutorials, and examples.
- Rendering
- Improve rendering realism.
While not our specialty, we are starting to look into deferred shading other advanced rendering techniques.
- Improve rendering realism.
- Physics & Performance
- CUDA support and more parallelization.
Parallelization has been a topic of conversation among developers, and one that has many caveats. Please contact us if you have insights and ideas. - Fluid dynamics.
Gazebo 3.0 will have an aerodynamics plugin, and water simulation may follow later this year. - Bullet integration.
Will be released in Gazebo 3.0.
- CUDA support and more parallelization.
- Robots and Models
- Estimate model parameters based on data collected from a real-system.
Interesting idea. We'll need some help making this a reality. - Human and crowd models.
We would love to help someone develop this feature. - Tracked robots.
This issue is very relevant.
- Estimate model parameters based on data collected from a real-system.
- Sensors
- Thermal, ultra-sonic, and touch sensors.
Please contact us for help developing more sensors. It usually helps to coordinate with someone who has the physical version of a sensor. - Laser beam widening over distance.
Great idea, and difficult to implement. Would love to hear ideas. - Distribute sensor generation.
This could be very useful. We'll have to look into this topic.
- Thermal, ultra-sonic, and touch sensors.
Thanks again to everyone for their help and support. We look forward to a productive year, and keep the ideas and feedback coming!
GSoC and OPW
2014-03-10
Open Source Robotics Foundation (OSRF) is a participant in Google's Summer of Code and Gnome Foundation's Outreach Program for Women. Accepted students will work with OSRF mentors to develop code for Gazebo, ROS, and CloudSim.
Take a look at OSRF's GSoC project list and OPW project list. These projects are only suggestions, and we highly encourage applicants to propose different projects. Make sure to contact OSRF to discuss project ideas and any questions you may have. OSRF maintains two mailing lists: gsoc@osrfoundation.org and opw@osrfoundation.org.


