Gazebo 6.0.0 Release
2015-07-27
Changelog | Migration Guide | Roadmap
End-of-life Notice
Gazebo 1.9 and 3.x have had a nice long lives, and it's time to put these version to rest. We will continue to address questions about Gazebo 1.9 and 3.x, but we will stop fixing bugs.
Highlights for 6.0.0
- Support for Windows (Beta)
- Integration with Oculus 2
- Hydrodynamics plugin
- Force/torque GUI tool
- Altimeter and magnetometer sensors
- Improved user interface for logging and playback.
Another six months has elapsed, and nicely polished Gazeob6 is ready for use. We spent a considerable amount of time delving into Windows in an effort make Gazebo cross-platform. The process of compiling Gazebo on Windows was both a learning experience, and an uphill battle. The good news is that you can now compile Gazebo natively on Windows. Over the coming months we will refine this process, and offer a proper Windows installer.
A few of Gazebo's internal libraries are slowing transitioning into separate packages. We noticed that Gazebo has many great capabilites that are hidden or difficult to use. Access to these features will improve with this separation, and Gazebo's core footprint will shrink. The first library to to start this transition is Gazebo's math library, which is now Ignition Math. Gazebo7 will see a complete transition to Ignition Math, and the start of Ignition Transport which replaces Gazebo's internal transport library.
Enjoy the new release, and thanks for all the contributions,
OSRF Development Team
Simulation Survey, 2015 Edition
2015-06-22
Thanks to everyone for filling out the Gazebo survey, and helping direct our development plans. We have received 128 responses from simulation users around the world. The following is a summary of the survey results
Feature votes
The survey consisted of thirteen high-level features and a text entry for comments. The features were on a scale from 1 to 5, where 1 is low importance and 5 high. The following figure shows the sum of the votes for each feature.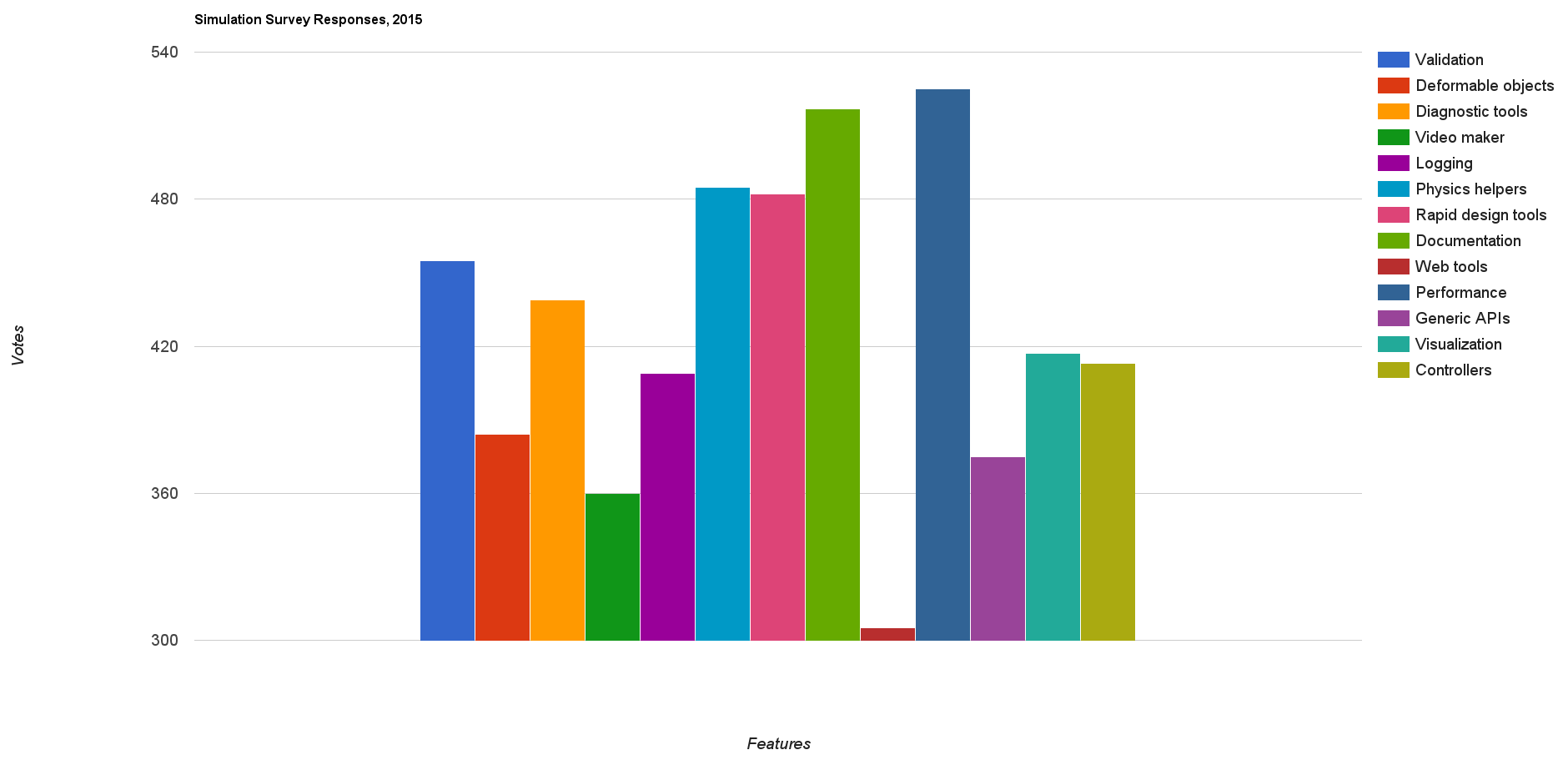 A nice dividing line exists around the 420 vote count. Six features are above this line:
A nice dividing line exists around the 420 vote count. Six features are above this line:
- Physics validation,
- Diagnostic tools,
- Physics helpers,
- Rapid design tools,
- Documentation, and
- Performance improvements.
Comments
The following is a condensed list of feedback we received in the comments section of the survey. There is no particular order to this list.- Tutorials and documentation: Comments included improved tutorials for plugins, developing new sensors, debugging, and robot control.
- Multiple distributions: This includes support for Windows, Mac, and other distributions of Linux besides Ubuntu.
- Performance: Using Gazebo in courses where students have low power computers would be helpful, and better support for laptops.
- Visualization and tools: Display of real and simulated sensor data. Support rewinding simulation, mobile obstacles (which I'm interpreting to be models that can be scripted), and improved human models.
- Physics: Support for springs, omniwheels and tracked robots, better grasping, air and water flows, grass and uneven terrain, fixed joints, stable and accurate physics, and better default physics values for different environments (eg: indoor vs outdoor).
- Formats: Allow import of Industry Foundation Classes (IFC) files, commonly used in the AEC industry. Merge SDF and URDF. Support for FMI and co-simulation. Get ROS to use Ignition Transport.
- Design: Graphical editor to build and edit robots and models. Not more editing text files.
Gazebo Retrospective
2015-06-16
The DARPA Robotics Challenge (DRC) has come to a successful close with impressive performances by all the competitors. Youtube has all the highlights and runs, in case you missed the excitement.
At the outset of the DRC, Program Manager Dr. Gill Pratt said, “The value of a cloud-based simulator is that it gives talent from any location a common space to train, design, test and collaborate on ideas without the need for expensive hardware and prototyping. That opens the door to innovation.” Taking that goal to heart, we worked together with DARPA and the DRC teams to make Gazebo into the most flexible, powerful, and capable robotics simulation available.
A few key milestones that have been achieved over the past three years include:
- Real-time high-fidelity simulation of a humanoid robot
- Support for four different physics engines
- Integration of aerodynamics and hydrodynamics
- Cloud-hosted global simulation competition
The Atlas robot from BDI, a 53-degree-of-freedom sensor heavy humanoid robot, runs on a modern desktop computer at or near real-time. To our knowledge, this represents the most complex robot simulation to date that runs in near real time on commodity computing hardware.
In addition to ODE, Gazebo supports DART, Simbody, and Bullet. This is the first time that such a diverse set of physics engines has been supported in one simulator.
Gazebo’s flexible plugin system has made it possible to simultaneously simulate ground, aerial, and underwater vehicles in expansive environments. Physically accurate simulation in all three environments is a first for a robotics simulator without suppressing physics properties.
As a preliminary stage in the DRC program, a virtual competition was conducted to determine which teams would receive funding and access to an Atlas humanoid robot. Leveraging advances in robot simulation, cloud hosted infrastructure, and web technology, we were able to accurately and efficiently simulate complex robots and environments on remote servers while providing realistic data streams for human-in-the-loop robot control.
The competition was a resounding success, with no major problems, and largely positive feedback from the participants. Importantly, the VRC achieved its goals: the most capable software teams were selected for award of an Atlas robot, and those teams were prepared immediately upon receipt of their Atlas, because they had already spent months developing their software using a high-quality simulation of the robot.
Use of Gazebo has expanded beyond the DRC and even the research community. Organizations such as FIRST and RoboCup have begun to use Gazebo either officially or experimentally. Industry is also adapting Gazebo. The Amazon Picking Challenge, a competition designed around complex object manipulation using a robot platform, utilizes Gazebo as a development and testing tool. Rethink Robotics simulates their Baxter industrial robot in Gazebo, and the ROS-Industrial Consortium actively makes use of Gazebo to simulate industrial arms.
Dr. Pratt said, “The DRC Simulator is going to be one of DARPA’s legacies to the robotics community.” We believe that goal has been achieved, thanks in large part to the support and contributions of an active community of simulation developers and users. We are excited to help provide users with this critical tool, and look forward to advances that simulation will take in the coming years.
Stop by the OSRF booth at the DRC Finals!
2015-05-29
OSRF is headed to the DRC Finals. Check out the blog post.
Gazebo on Windows
2015-05-14
After many long years, Gazebo has finally been ported to Windows. Communication between Windows, Linux, and Mac is also supported. The video below demonstrates Gazebo running in Windows on a virtual machine. An instance of gzclient running on the Linux host machine then connects to the Window's server. Objects can be inserted, moved, and deleted on either machine.
You can grab support for Windows on the master branch of Gazebo. Make sure to follow these install instructions. Or you can wait for the release of Gazebo6 on July 27th, 2015.


