Gazebo Newsletter: August 2016
2016-08-12
Gazebo Newsletter 4 August 2016
Tip of the month
Toggle the pause state of Gazebo using the space bar, just as you would almost any media player.
Development
It is summer time, which means many people on vacation. As a result development news is on the light side.
- Video recorder
A new pull request to Gazebo adds the ability to record the user camera to a video file.
- Visual plugin
Check out this world file and plugin for example on how to manipulate visual elements in Gazebo.
Featured Model
A new delta wing model is under development, and will soon be made available through the model database.
Releases
- Ignition Transport 2.0.0
- Ignition Messages 0.5.0
- Ignition Math 2.5.0
- Ignition Common 0.1.0
- Gazebo 7.3.1
Bugs
- Open
- Critical
- Featured Issue
Gazebo Issue #963: Add support for bullet3 (GPU-accelerated physics)
Questions and Answers
Most recent active questions
Gazebo Newsletter: July 2016
2016-07-11
Gazebo Newsletter 3 July 2016
Tip of the month
By default, the Gazebo graphical user interface will start full screen. It is possible to change this behavior. Try resizing and moving the main window. Then select File->Save Configuration. The next time Gazebo starts, the window position and size will be restored.
The position and size information is stored in a file called ~/.gazebo/gui.ini. You can manually modify this file by adjusting or adding the following lines:
[geometry]
x=x_position_in_pixels
y=y_position_in_pixels
width=window_width_in_pixels
height=window_height_in_pixels
Development
- Additional integration of plotting to Gazebo default.
- A new Gazebo Harness plugin allows an object to be slowly lowered. This might be useful for humanoid robots that need to bring up their controllers while suspended.
- Additional Windows development, thanks to Aaron Clauson.
- A new camera plugin reports the image coordinates of fiducials that fall within a camera's view frustum.
- Actors have been generalized to support fluid animation and scripting for models with a skeleton and models without.
- Ignition Math
- New inertial class allows diagonalization of inertia matrices to determine principal moments, and also allows lumping inertial properties of rigid bodies into single body.
- New temperature class
- Ignition Transport
- Improved services to support requests without an input parameter, and without a response.
- Updated documentation.
- Contributed bug fixes
- Gazebo: Guilherme Campos Camargo, Aaron Clauson, Femer, Almin Causevic (GSOC)
- Ignition Transport: Nadya Ampilogova (GSoC) - 142, 151, 152
- Gazebo JS: Mohamd Ayman (GSoC) - 7, 10
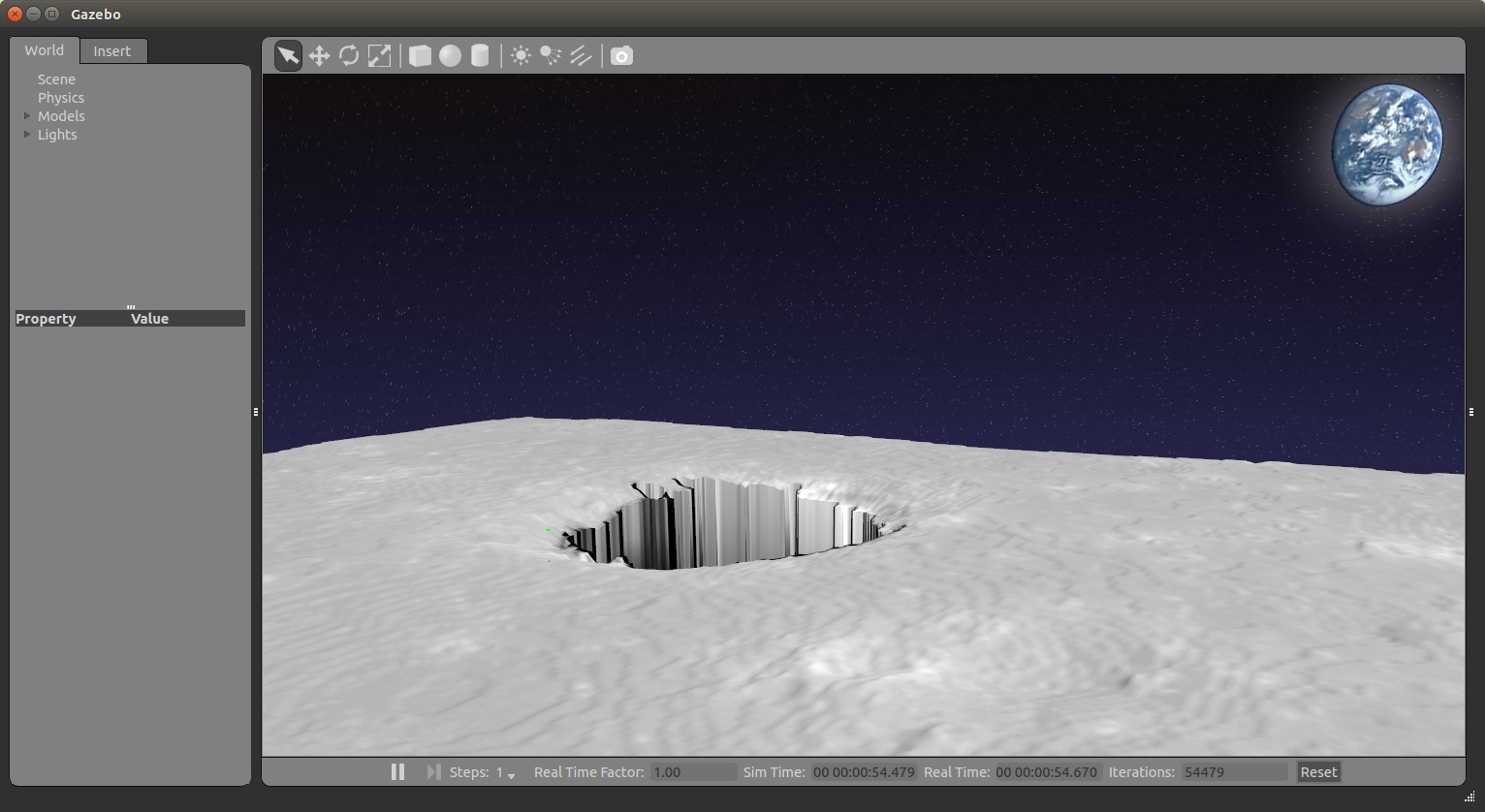
Featured Model
A model of the Lunar Tranquillitatis Pit has been added to the Gazebo model database.
Releases
- SDFormat 4.1.1
- Ignition Math 2.4.1
- DRCSim7 (drcsim compatible with Gazebo7)
- Gazebo7 ROS packages for Indigo+Trusty and Jade+(Trusty/Vivid)
- Gazebo ROS control (gazebo_ros_control) for Kinetic and Jade
Bugs
- Open
- Critical
- Featured Issue
Gazebo Issue #622: Joint velocities are high when the joint link is in contact and the joint is not rotating
Questions and Answers
Most recent active questions
Gazebo Newsletter: June 2016
2016-06-03
Gazebo Newsletter 2 June 2016
This past month we have started a development push on our web-technologies. CloudSim, a tool used to provision and manage cloud-based simulations, and PropShop are getting a reboot. Stay tuned over the coming months for updates.
We spent a week on a usability sprint, with the goal of putting ourselves in the shoes of first-time simulation users. The sprint utilized the FIRST 2016 competition environment. Two teams were tasked with constructing three robots using Gazebo and ROS. At the end of the week we generated and long list of usability issues, which we are now busy resolving.
We had a bit of fun at the end of the sprint, in the form of a live competition. Both teams setup in the OSRF cafe, and connected to Gazebo running the FRC 2016 environment. Check out the video below for a quick take on the robots we created.
Check out our robot building tutorial to make your own robot, and the FRC 2016 repository for the simulation environment.
Tip of the month
This month's tip is about improving simulation performance.
- Use simple shapes for collision elements, rather than meshes.
Triangle mesh collisions are both CPU intensive and error prone. Use mesh objects for visuals, and simple shapes for collisions.
- Reduce joint count.
Try to reduce the number of joints, including fixed joints, in models. Each joint introduces a constraint that the physics solver must compute.
- Simplify meshes.
Meshes may contain screws and internal structures that are not useful in simulation, and only slow down rendering.Open your meshes in a 3D modeling tool, such as Blender, and remove or reduce the number of triangles.
- Review your sensors.
Check sensor update rates and resolutions. For example, ask yourself if you need an HD camera in simulation.
Development
- Thanks to Nicolas Dessart, Jeongseok Lee, and Guilherme Campos Camargo for fixing bugs in Gazebo.
- Thanks to Stefan Glaser, Camm11, and Jason Z Liang for fixing bugs in Robocup3ds.
- Work continues on Gazebo for Windows. An internal development branch contains an experimental version that adds plugin support to Gazebo on Windows.
Releases
- RoboCup3DS support for Ubuntu Xenial
Bugs
We need your help to squash bugs! Please visit our issue trackers to get started.
- Open
- Critical
- Featured Issue
Gazebo Issue #1058: Update GearBox Joint Definition
Questions and Answers
Most recent active questions
Gazebo Newsletter: May 2016
2016-05-09
Gazebo Newsletter 1 May 2016
Welcome to the first installment of the Gazebo newsletter.
Tip of the month
This month's tip is about debugging problems with simulation.
- Start Gazebo paused with the "-u" command-line argument. Useful when you need to visualize simulation state before physics kicks in.
$ gazebo -u
- Look in the log files for errors, warnings, and other information.
~/.gazebo/ogre.log
~/.gazebo/server-*/*.log - Visualize model properties in the GUI.
View Menu -> [Collisions, Joints, Inertia, Center of Mass]
- Use verbose mode to output more information on the command line.
$ gazebo --verbose
Development
- Gazebo's API has a new look, and resolves a few issues.
- Over the past month, significant effort has been put into a new graphical plotting tool for Gazebo. Check-out the plotting branch in Gazebo to give it a spin. This also marks the first use of Ignition Transport with Gazebo.
- Big thanks to Olivier Crave for contributing an Atmosphere and Wind model to Gazebo.
- Thanks also to Thomio Watanabe, Olivier Crave, Almin Causevic, and Gama11 for their bug fixes! We love to see bugs squashed.
- Peter Mitrano has started work on improving compilation speed using precompiled headers.
Releases
- Gazebo 7.1.0 (Change Log)
- SDFormat 4.1.0 (Change Log)
- Ignition Robotics
- Msgs 0.3.0
- Transport 1.2.0
- RoboCup3DS 0.2.0
- gazebo_ros_pkgs
- Kinect Scheduled for release on May 23rd
- Jade and Indigo available in Shadow Fixed
Bugs
We need your help to squash bugs! Please visit our issue trackers to get started.
- Open
- Critical
- Featured Issue
Gazebo Issue #1748: Camera sensor timestamp regression from Gazebo2 to Gazebo4+
Questions and Answers
Most recent active questions
ArduPilot Gazebo Plugin and Tutorials
2016-02-02
ArduPilot Plugin
The fine folks at DIY Drones have created a new ArduPilot plugin for Gazebo. Check out their blog post for more information. Their demo video, below, is an impressive demonstration of the ArduPilot plugin and Gazebo.
Tutorials
Documentation and support materials are extremely important, especially when using a complex system like Gazebo. First time users of Gazebo typically face a large learning curve that can be daunting. In an effort to reduce this learning curve, we have added new tutorials and restructured the tutorial system. A new section, called Guided, features tutorials that offer more structure. The first set of Guided tutorials are targeted to beginners. Over the next few months additional tutorials for intermediate and advanced users will be added.


